| |
TBD |
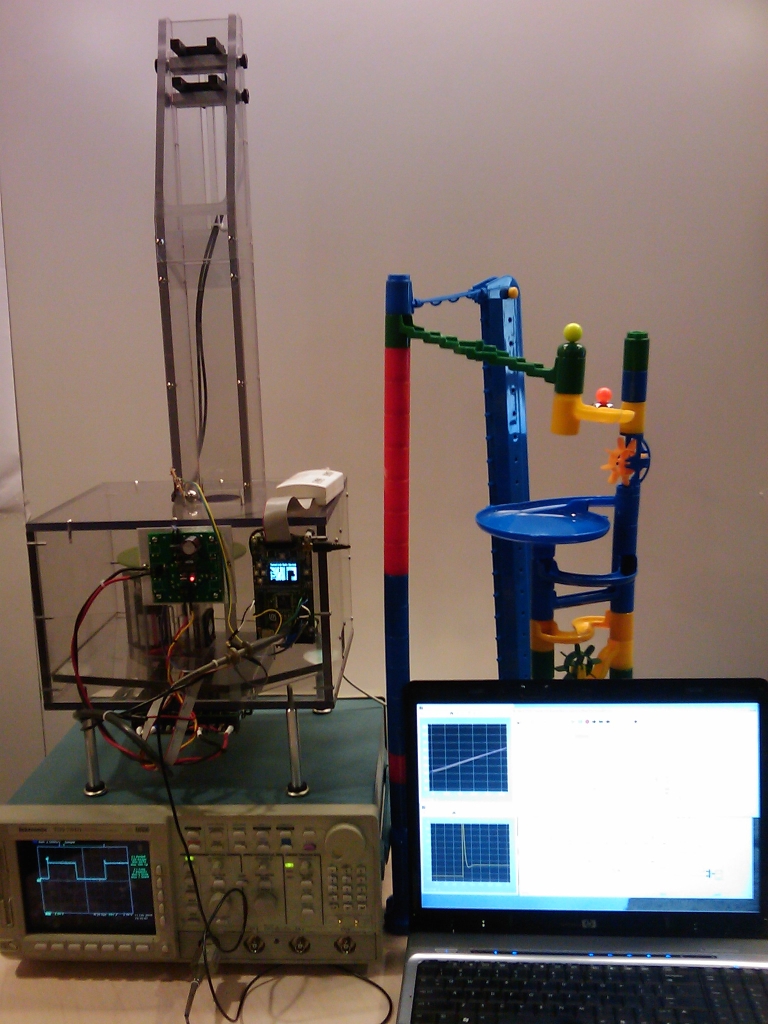
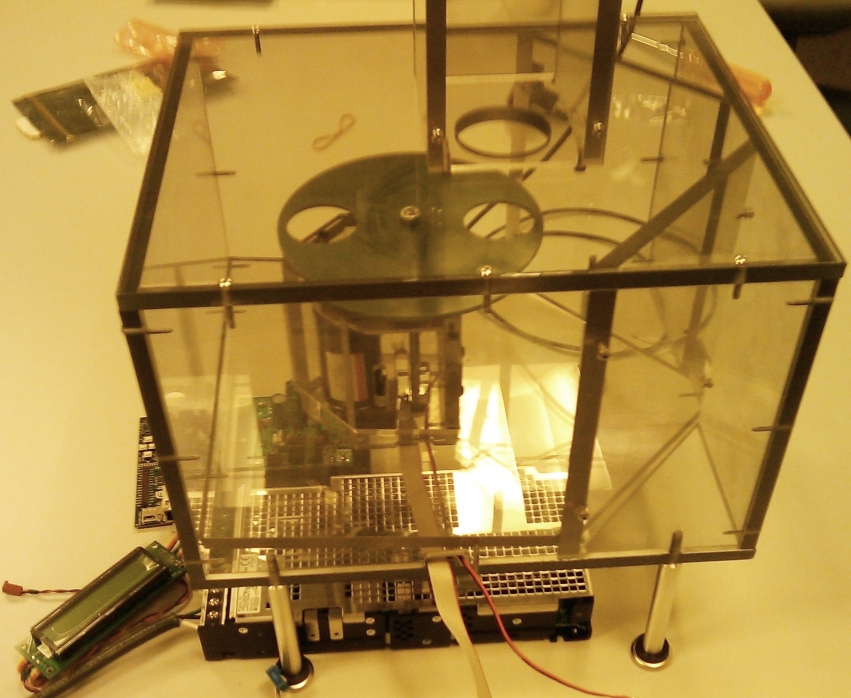
Tunneling Ball Device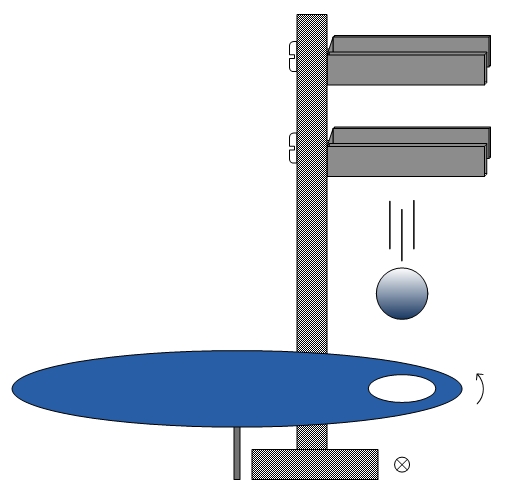
The Tunneling Ball Device is a cyber-physical system whose operation demands hardware and real-time embedded computing that deliver high-precision sensing and actuation. Computations are event driven, and signals present reflect those in an automotive engine control unit for control of fuel injection, ignition timing, and valve retraction of an automotive engine. The system is naturally extensible to a distributed platform, presenting an interesting example for modeling of distributed cyber-physical systems. Steel ball bearings are dropped one at a time at sporadic intervals towards a fixed drop target located below a spinning disc. The disc has been bored through at two opposite ends, and the ball will pass ("tunnel") through untouched if the disc is correctly aligned at the time of impact. Should the disc be improperly rotated, the ball will impact the disc and the device has failed. The device must sense when a ball is dropped, track the position of the disc, and adjust the trajectory of the disc so that the ball tunnels through the disc untouched. Only one ball will be above the disc at any time, and between drops the disc should return to a default speed. The disc must not stop at any time, and changes in rate should be minimal. Visit or search the Tunneling Ball Device Wiki for technical specifications, known issues, and generation information. The device was first introduced and modeled in the EECS Technical Memorandum, Elements of Model-Based Design. EECS c149 project ideas (Spring, 2010).
|